Aula 8 - Controle e Programação de robôs manipuladores industriais
Leitura de 5 min
Conceitos básicos
Planta
Grupo de itens de uma máquina que funciona conjuntamente, cuja finalidade é desenvolver uma dada operação
Processo
Operação ou sequência de operações que implicam em mudança de estado, de composição, de dimensão ou outras propriedades que possam ser definidas relativamente a um padrão
Pode ser contínuo ou em batelada
Sistema
Combinação de componentes (hardware, software ou humanos) que atuam conjuntamente e realizam um certo objetivo
Variável do Processo (PV) ou Variável Controlada
Qualquer quantidade, propriedade ou condição física medida a fim de que se possa efetuar a indicação e/ou controle do processo
Variável Manipulada (MV)
Grandeza operada com a finalidade de se manter a variável controlada no valor desejado
Set Point (SP) ou Set Valor (SV)
Valor desejado, estabelecido previamente como referência de ponto de controle no qual o valor controlado deve permanecer
Distúrbio (Ruído) ou Perturbação
Sinal que pode afetar adversamente o valor da variável controlada
Desvio
Valor resultante da diferença entre o valor desejado e o valor da variável controlada
Ganho
Valor resultante do quociente entre a taxa de mudança na saída e a taxa de mudança na entrada que a causou
A entrada e a saída devem ser expressas na mesma unidade
Controle
Controle automático
Envolve a manutenção de uma certa variável ou condição em um certo valor (fixo ou variante), o valor desejado (set point)
Forma geral de operação
Medida (por sensores) do valor atual da variável que se quer regular
Comparação dos valores atual e desejado para determinação do desvio
Utilização do desvio (ou erro) para gerar um sinal de correção
Aplicação do sinal de correção ao sistema a controlar para eliminar o desvio, ou seja, reconduzir a variável ao valor desejado
O sinal de correção introduz variações de sentido contrário ao erro
Tipos de sistemas de controle
Malha aberta
Malha fechada
Malha aberta
Só o comando define o comportamento do controlador
Responde com atuação no ambiente
Não verifica se o níveo da grandeza física corresponde a entrada
Não há sensor para observar desvios, nem realimentação para corrigi-los
Aplicações
Lugares onde a frequência/consequência dos desvios não justificam a maior complexidade e custo
Diagrama:
A entrada (comando) é o nível desejado da grandeza contorlado
O controlador avalia este sinal e envia um sinal ao atuador
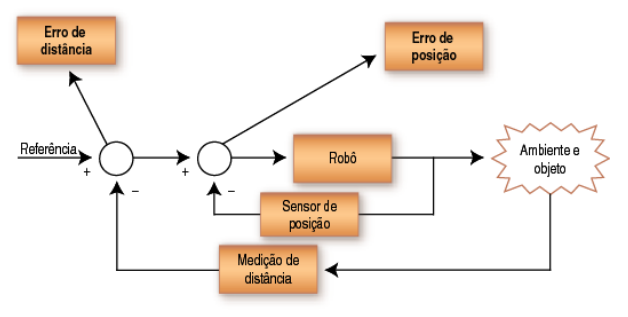
Malha fechada
Controlador considera a entrada e desvios
Sensor monitora a saída, fornecendo um sinal que retorna a entrada (realimentação)
A entrada e a realimentação são comparadas e obtém-se o erro, que será compensado pelo controlador
Diagrama:
Diferenças com de malha aberta: presença de sensor e comparador
O sensor emite um sinal que corresponde à medida do realizado pelo atuador (saída)
O sinal de saída é comparado ao sinal de entrada e um erro é apresentado
O sinal combinado (entrada e erro) é apresentado ao controlador, que o avalia e tenta corrigir o desvio captado pelo sensor, através de um novo comando ao atuador
Ações de controle
São usadas para modificar (ou não) a posição do elemento final de controle
Modos de acionamento
Ação direta (normal)
Ação inversa (reversa)
Tipos de ações
Liga-desliga, Proporcional, Integral, Derivativo, Proporcional + Integral + Derivativo (PID) e outras combinações (PD, PI, …)
Controle Liga-desliga
Só existem dois estados (aberto/fechado)
Vantagens
Simples
Baixo custo
Desvantagens
Contínua oscilação de saída, histerese, não garante precisão e pode desgastar controlador e atuador
O valor médio da grandeza sob controle será sempre diferente do desejado, provocando o aparecimento de um desvio residual denominado erro de offset
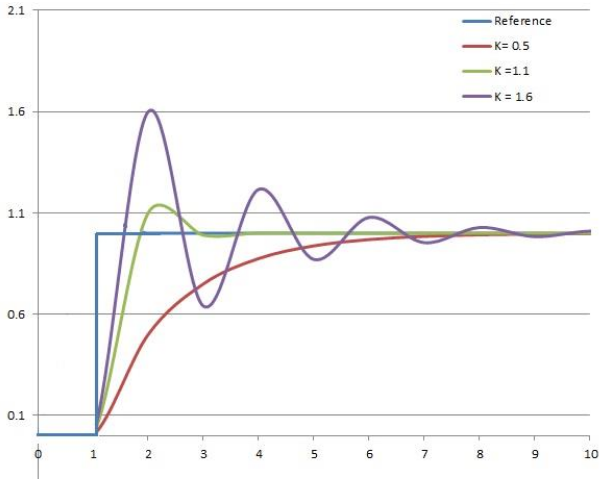
Proporcional
Ganho (ação corretiva) proporcional ao erro medido
Reação baseada no erro atual
Problema com ganhos altos
Overshoot, oscilações
Pode implicar potência alta mesmo próximo do valor desejado
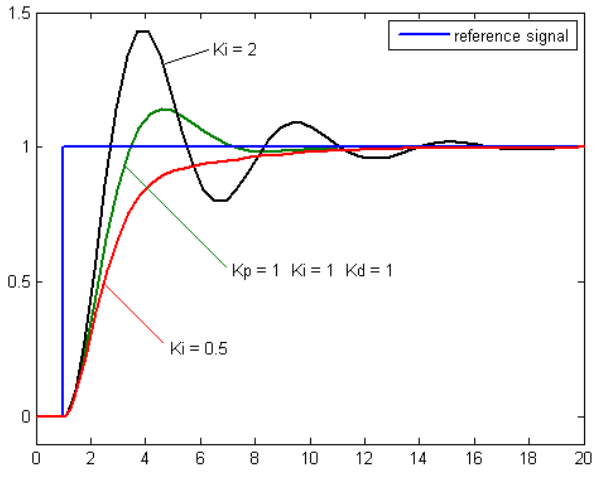
Integral
Atua enquanto existir diferença entre valor desejado e valor medido
Sinal de correção integrado no tempo
Reação baseada na acumulação dos erros recentes
Soma produtos dos valores instantâneos de entrada por intervalos de tempo t
Desvantagens
Integrador torna o sistema lento, o que atrasa o acionamento do atuuador
Resposta depende da acumulação de erro na entrada, podendo levar a erro de regime nulo (saída sem sinal de entrada)
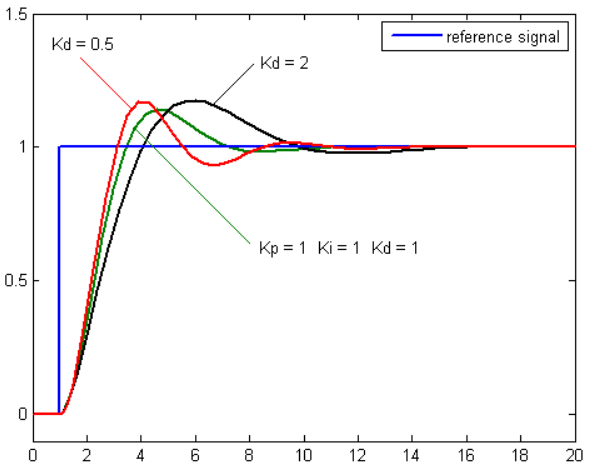
Derivativo
Reage em função da velocidade do desvio
Fornece uma correção antecipada do desvio
Previne o sistema quanto ao aumento do desvio e diminui o tempo de resposta
Não atua caso o desvio seja constante
É usado para minimizar overshoot e oscilações
Não pode ser utilizado sozinho em uma malha de controle
Controlador PID
Mais adequado para as malhas fechadas
Proporcional elimina as oscilações
Integral elimina o desvio de offset
Derivativa fornece ação preventiva à variação do desvio
Combinação dos termos
u(t)=MV(t)=Kpe(t)+Ki∫0te(t)dτ+Kddtde(t)
Kp ganho proporcional
Ki ganho integral
Kd ganho derivativo
e erro (SP−PV)
t instante no tempo
τ variável tempo na integração (de 0 a t)
Classificação dos Sensores
Quanto ao tipo de medida:
Proprioceptivos (Proprioceptive)
Medem valores internos ao robô
Velocidade do motor;
Carga nas rodas;
Ângulos de partes móveis;
Tensão na bateria, etc.
Exteroceptivos (Exteroceptive)
Medem valores externos (estímulos externos)
Medidas de distância a objetos;
Luminosidade;
Amplitude de som, etc.
Quanto à emissão de Energia:
Passivos
A energia vem do próprio ambiente
Sensor de Temperatura;
Microfones;
Câmeras CCD ou CMOS, etc.
Ativos
Emitem energia para o ambiente e depois medem sua reação. Apresentam uma performance melhor, mas são influenciados pelo ambiente.
Sensor Ultra-som, Sensor Laser, etc.
Principais tipos de sensores industriais
Proximidade
Mecânicos, ópticos, indutivos e capacitivos
Posição e velocidade
Potenciômetros, LVDT, encoders absolutos e relativos e tacogeradores