Os parâmetros de movimento são definidos para as juntas
Computacional mente mais fácil
Espaço Cartesiano
Os movimentos são definidos para {T} em relação ao tempo
Mais custoso computacionalmente
Esquemas do espaço de juntas
Formas de percurso são descritas em termos de funções dos ângulos das juntas
Não leva a singularidades
Métodos para modelamento matemático
Polinômios cúbicos para trajetórias com pontos de passagem
Função linear com combinações parabólicas (splines)
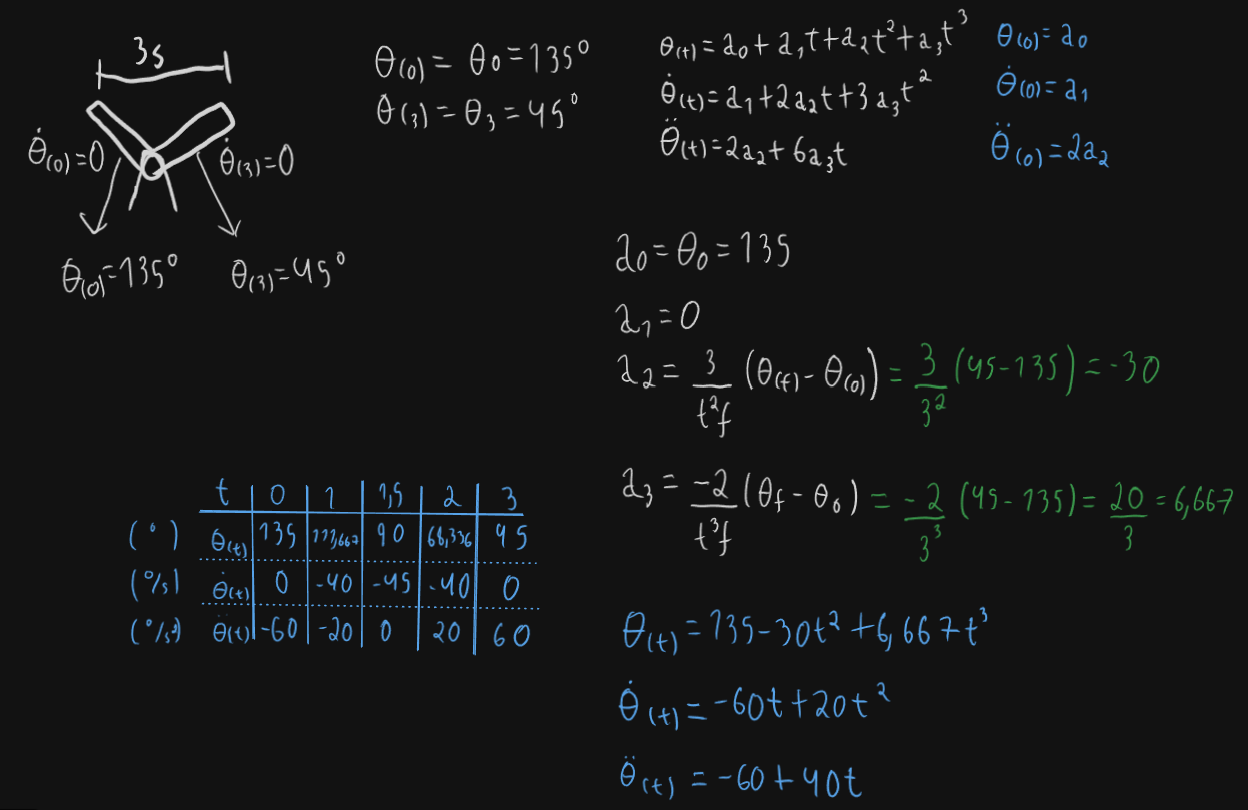
Polinômios cúbicos
Definir uma função para cada junta cujo valor em t0 seja sua posição inicial e em tf a sua posição meta
Restrições
Posições angulares definidas
Velocidades inicial e final iguais a zero
Atendidas por um polinômio de 3º grau
θ(t)=a0+a1t+a2t2+a3t3
Então, a velocidade e a aceleração
θ˙(t)=a1t+2a2t+3a3t2θ¨(t)=2a2+6a3t
Polinômios cúbicos com juntas de passagem
Em uma trajetória, normalmente não se deseja que o robô pare nos pontos de passagem
Velocidades inicial e final diferentes de 0
Usuário pode especificar
Sistema pode usar heurística para estimar automaticamente
Esquemas do espaço cartesiano
Aplica-se a trajetórias no sistema da ferramenta {T}
Meta é definir funções bem conhecidas de trajetória
Linha reta ou círculo/semicírculo
A trajetória é então suavizada
Em seguida, definem-se os pontos de passagem
Por fim, mapeia-se para o espaço das juntas
Problemas
Alto custo computacional
Pode levar a situações de singularidade do mecanismo
Geração de trajetórias em tempo de execução
O problema envolve calcular as variáveis de junta (posição, velocidade e aceleração) a cada instante t
No espaço de juntas: métodos que envolvem splines
Splines cúbicos
Função computada à medida que t avança
Ao fim de um segmento, um novo conjunto de coeficiente cúbicos é evocado e t é reiniciado em 0
Splines lineares com combinações parabólicas
t é verificado instantaneamente para determinar a porção linear ou combinatória da função
No espaço cartesiano
Computa-se a trajetória com spline combinada com parabólica no espaço cartesiano do TCP para cada instante t
Para cada solução, aplica-se a inversa da Jacobiana para obter as velocidades nas juntas, e a derivada para obter a aceleração
Problemas com espaço cartesiano
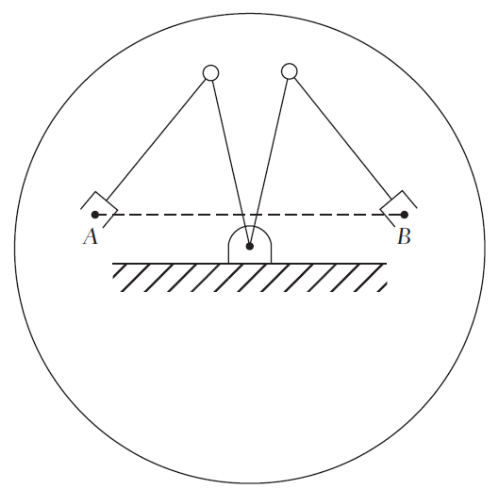
Pontos intermediários inalcançáveis
Podem existir pontos da trajetória que incidem fora do workspace. O movimento seria possível no espaço de juntas, mas no cartesiano não
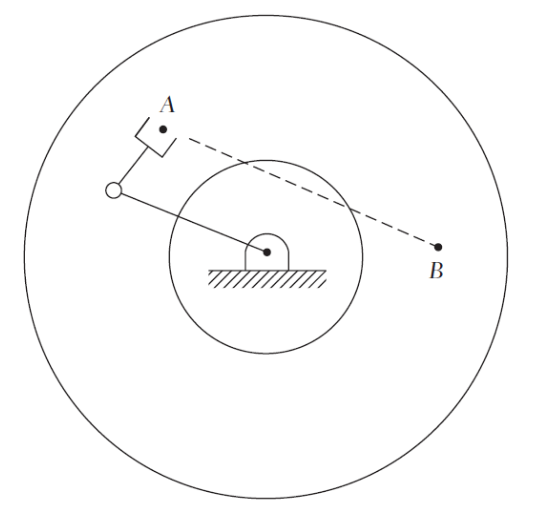
Alta velocidade das juntas próxima a singularidades
Durante o percurso, se o manipulador aproximar-se de um ponto de singularidade, a velocidade da junta tenderia ao infinito, e pode forçar o desvio do curso.
No exemplo: quanto mais a trajetória aproximar-se do eixo da junta 1, maior será a velocidade. Uma solução seria reduzir a velocidade geral da trajetória.
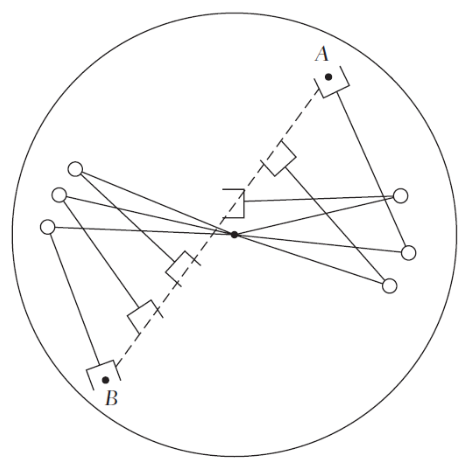
Início e alvo atingíveis por diferentes soluções
Esse tipo de problema é, muitas vezes, inevitável, e piora à medida que aumenta o número de GDLs.
Estratégia geral: procurar definir movimentos no espaço de juntas para a maior parte da tarefa e deixar os movimentos em espaço cartesiano para situações realmente necessárias.
Outros problemas com trajetórias
Modelo dinâmico
Alterações (atrito, força, carga) e diferentes direções (gravidade) podem alterar os parâmetros de aceleração
Colisão com obstáculos
Trajetórias fixas não prevêem alterações no ambiente
Quanto mais obstáculos, mais pontos de passagem
Cooperação com dispositivos ou outros manipuladores